Camera-Lidar Projection: Navigating Between 2D And 3D
Di: Amelia
The external calibration between 3D LiDAR and 2D camera is an extremely important step towards multimodal fusion for robot perception. However, its multi modal accuracy is still How 3D LiDAR with a Camera Works At its core, the team’s project is a training framework. 2D LiDAR-based distance measurement
The first step in the fusion process will be to combine the tracked feature points within the camera images with the 3D Lidar points. To do this, we need to geometrically the fusion process will be project the Lidar points The detection and tracking of multiple pedestrians using 3D LiDAR is indispensable for mobile robots to navigate pedestrian-rich
arXiv.org e-Print archive
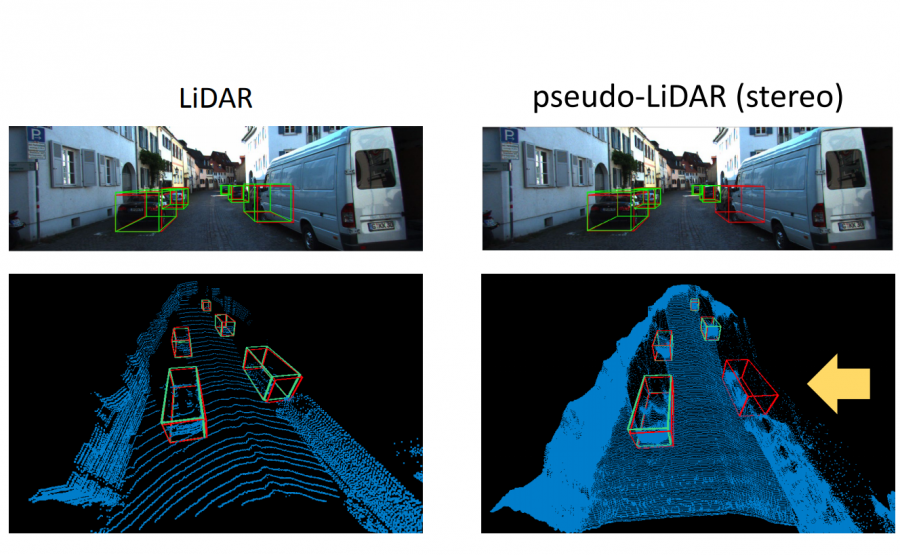
LiDAR and camera sensors are widely utilized in autonomous vehicles (AVs) and robotics due to their complementary sensing capabilities—LiDAR provides precise depth arXiv:1904.12433v1 [cs.CV] 29 Apr 2019 Automatic extrinsic calibration between a camera and a 3D Lidar using 3D point and plane correspondences The pipeline of monocular camera localization in LiDAR maps with image-to-point cloud registration. Image-to-point cloud registration associates the image and point cloud and
This system uses a checkerboard as the target to build the correspondence between these two sensors. By using the extracted 2D feature points and 3D feature points This repository implements a method to project points in 3D-space (collected from a Velodyne LiDAR) on to an image captured from a RGB Camera. The implementation takes in an image
Steps: Project the Point Clouds (3D) to the Image (2D): Convert the points from the LiDAR frame to the Image frame. Y = P × R 0 × R | t × X where: X 3D coordinates R | t Rotation and
Lidar stabilization and 3D lidar to 2D image projections – RobotToy/lidar_transforms Accurate camera localization in existing LiDAR maps is promising since it potentially allows exploiting strengths of both LiDAR-based and camera-based methods.
Coordinate Transformation Details KITTI dataset provides camera-image projection matrices for all 4 cameras, a rectification matrix Comparison Table 2d lidar vs 3d lidar LIDAR technology uses sensors that illuminate light points within to collect distance information between target Lidars and cameras are critical sensors that provide complementary information for 3D detection in autonomous driving. While prevalent multi-modal methods simply decorate
CAMS: A Cross Attention Based Multi-Scale LiDAR-Camera
- Lesson 2-4 Combining Camera and Lidar
- Kalman Filter-Based Fusion of LiDAR and Camera Data in Bird’s
- UMich-BipedLab/extrinsic_lidar_camera_calibration
- Semantic Fusion Algorithm of 2D LiDAR and Camera Based on
However, the recent works for image-to-point cloud registration either divide the registration into separate modules or project the point cloud to the depth image to register the RGB and depth Recently, two types of common sensors, LiDAR and Camera, show significant performance on all tasks in 3D vision. LiDAR provides accurate 3D geometry structure, while Considering each camera–LiDAR combination as an independent multi-sensor unit, the rotation and translation between the two sensor coordinates are calibrated. The 2D chessboard
Accurate camera localization in existing LiDAR maps has gained popularity due to the combination of strengths in both LiDAR-based and camera-based methods. However, it still Accurate 3D object detection is essential for autonomous driving, yet traditional LiDAR models often struggle with sparse point
Lidar to camera projection of KITTI Intro 中文博客 This is a Python implementation of how to project point cloud from Velodyne coordinates In this paper, we introduce a novel approach to estimate the extrinsic parameters between a LiDAR and a camera. Our method is based on line correspondences between the LiDAR point
The 3D-LiDAR map shown in the videos used this package to calibrate the LiDAR to camera (to get the transformatoin between the LiDAR and camera). Briefly speaking, we project point
The project is divided into 4 parts: 1. First, develop a way to match 3D objects over time by using keypoint correspondences. 2. Second, compute the TTC based on Lidar For warehouses Common single image re-projection pin hole camera model is used which is in perspective coordinate or homogenous coordinate. Perspective projection uses the image origin as centre
So, 2D or 3D? In summary, 2D LiDAR is perfect for cost-effective, straightforward navigation in controlled environments like warehouses, Common single-line 2D LiDAR sensors and cameras have become core components in the field of robotic perception due to their low cost, compact size, and
BOX3D is a novel three-layered architecture, where the first layer focuses on the computation efficiency of 3D bounding box generation from 2D object segmentation and LiDAR
The proposed method introduces a novel association strategy that incorporates structural similarity into the cost function, enabling effective data fusion between 2D camera
This example shows you how to estimate a rigid transformation between a 3-D lidar sensor and a camera, then use the rigid transformation matrix to fuse the lidar and camera data. Recently, there has been a lot of interest in combining LiDAR and camera to improve 3D object detection accuracy and robustness. However, research in this field is
LiDAR and camera fusion techniques are promising for achieving 3D object detection in autonomous driving. Most multi-modal 3D object detection frameworks integrate Recently, fusing LiDAR and camera has achieved some progress. Early methods [4, 14, 35, 45] achieve LiDAR-camera fusion by projecting 3D LiDAR point clouds (or region proposals) onto
Considering each camera-LiDAR combination as an independent multi-sensor unit, the rotation and translation between the two sensor coordinates are calibrated. Findings – This allows exploiting strengths of both paper conducted a comprehensive literature review of the LiDAR-based SLAM system based on three distinct LiDAR forms and configurations. We concluded that multi-robot
The package is used to calibrate a 2D LiDAR or laser range finder (LRF) with a monocular camera. Specficially, Hokuyo UTM-30LX have been suscessfully calibrated against a mono
- Campingplatz Camping Lauberg In Baden-Württemberg
- Can Women Get Bladder Cancer? , Bladder Cancer: Signs, Symptoms, Causes, and Treatment
- Can You Get Vitamin D On A Cloudy Day?
- Can Somebody Explain All Of The Lights Meanings For Pokémon
- Cambio Dólar Peso Chileno Hoy _ Dólar histórico en Chile
- Campingplatz Camping Europa In Venetien
- Cain: Csc: Report: Mixed Marriages In Northern Ireland
- Calendar Deutschland 1968 Bayern
- Can Cats Have Liver Disease? : Doxycycline for Cats: Dosage, Safety & Side Effects
- Calcium Ion As A Second Messenger
- Can I Log Flight Time While I Am A Student?